
|

|
|
|
Johns Web Site
|
Date: 1-3-2016
|
Number of Hours: 6.00
|
Manual Reference:
|
Brief Description: Auto Pilot Servo Mount Preparation
|
|
I have known from the start of this project that I wanted to have a two axis auto-pilot. In my mind it is a safety feature that has reduced the pucker factor several times for me when I needed to split my attention between flying the plane and something else that became urgent.
Over the past few weeks I took the time to design the mounting system for the AP pitch and yaw servos. The ideal location seemed to be under the seat pan. To start the design process, I found drawings for the servos on line, and used this information to generate a solid model of the servo in my CAD system (ProEngineer Wildfire 4.) I also had to generate a simplified model of the forward fuselage structure, by using measurements from my fuselage tubular frame, and parts of the control system. This is not difficult, but it takes time.
The servo data sheet stipulated that the servo arm rotation should not exceed +/- 60-degrees, to prevent approaching an “over-center” condition. With this in mind, I designed the system to limit the required servo excursion to +/- 1.25”, using the outermost attachment point on the servo arm. For the pitch axis, this meant that the connection to the elevator reverser arm would be 2.857” from the reverser axis, to enable full stop-to-stop motion.
For the roll axis, the total travel needed was only +/- 1.156”, well within the servo range, enabling a simple short connection through coupled male and female rod ends.
The resulting design is shown in the CAD screen captures below. However, there were two issues that needed to be resolved. See the next log entry.
|
|
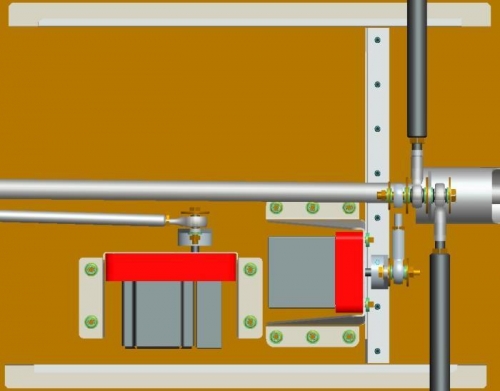
Top View of the AP Servo Mounts and Connections
|
|
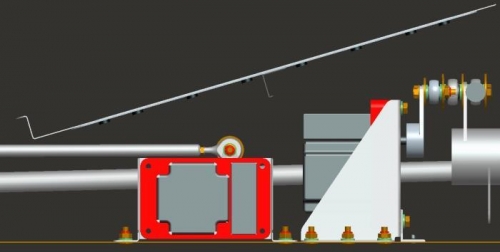
Right Side View
|
|
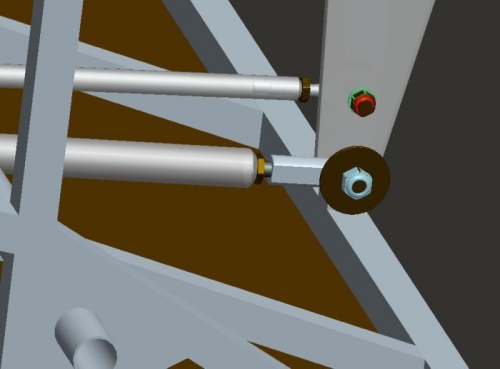
Connection to the Elevator Reverser
|
|
|
|
|
|
|
|
|
Copyright © 2001-2024 Matronics. All Rights Reserved.
|