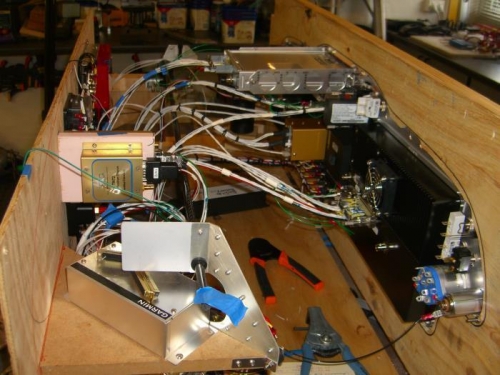
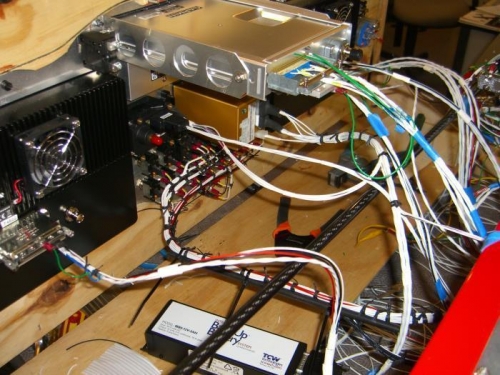
Over the past few days I've been able to wire the CAN bus to the panel mounted LRUs. Starting at the MFD then G5 - GMC507 - GTR200 - PFD - GEA24 - GSU25. From there the bus will eventually continue to the autopilot servos before terminating at the GMU11 remote compass. Today I tested the bus using the IBBS back-up battery & interestingly, the G5 immediately loaded its update from the PFD. All seemed to be OK so once again biting a bullet, I applied power to the VPX for the first time using a 12V battery. So far so good and the GTR200 also performed a software update on initial power up. The transponder, FLARM & propeller controller also accepted power without problem. Lots of setting up to do on the system but at this stage I'm very happy with the result.